Mărimea scalară T, egală cu suma energiilor cinetice ale tuturor punctelor sistemului, se numește energia cinetică a sistemului.
Energia cinetică este o caracteristică a mișcării de translație și rotație a unui sistem. Schimbarea sa este influențată de acțiunea forțelor externe și, deoarece este scalar, nu depinde de direcția de mișcare a părților sistemului.
Să găsim energia cinetică pentru diferite cazuri de mișcare:
1.Mișcare înainte
Vitezele tuturor punctelor sistemului sunt egale cu viteza centrului de masă. Apoi
Energia cinetică a sistemului în timpul mișcării de translație este egală cu jumătate din produsul dintre masa sistemului și pătratul vitezei centrului de masă.
2. Mișcare de rotație(Fig. 77)
Viteza oricărui punct de pe corp: . Apoi
![]()
sau folosind formula (15.3.1):
![]()
Energia cinetică a unui corp în timpul rotației este egală cu jumătate din produsul momentului de inerție al corpului față de axa de rotație și pătratul vitezei sale unghiulare.
3. Mișcare plan-paralelă
Pentru o mișcare dată, energia cinetică constă din energia mișcărilor de translație și rotație
Cazul general al mișcării oferă o formulă de calcul a energiei cinetice similară cu ultima.
Definiția muncii și puterii am făcut-o în paragraful 3 al capitolului 14. Aici ne vom uita la exemple de calcul a muncii și puterii forțelor care acționează asupra unui sistem mecanic.
1.Lucrul forțelor gravitaționale. Fie , coordonatele pozițiilor inițiale și finale ale punctului k al corpului. Lucrul efectuat de forța gravitațională care acționează asupra acestei particule de greutate va fi ![]() . Apoi lucrarea completă:
. Apoi lucrarea completă:
unde P este greutatea sistemului de puncte materiale, este mișcarea verticală a centrului de greutate C.
2. Lucrul forțelor aplicate unui corp în rotație.
Conform relației (14.3.1), putem scrie , dar ds conform figurii 74, datorită micimii sale infinite, poate fi reprezentat sub forma ![]() - un unghi infinitezimal de rotație al corpului. Apoi
- un unghi infinitezimal de rotație al corpului. Apoi
Magnitudinea ![]() numit cuplu.
numit cuplu.
Rescriem formula (19.1.6) ca
Lucrul elementar este egal cu produsul cuplului în funcție de rotația elementară.
La rotirea prin unghiul final avem:

Dacă cuplul este constant, atunci
iar puterea este determinată din relația (14.3.5)
ca produs dintre cuplul și viteza unghiulară a corpului.
Teorema privind modificarea energiei cinetice demonstrată pentru un punct (§ 14.4) va fi valabilă pentru orice punct din sistem

Compunând astfel de ecuații pentru toate punctele sistemului și adunându-le termen cu termen, obținem:

sau, conform (19.1.1):
care este o expresie a teoremei asupra energiei cinetice a unui sistem în formă diferențială.
Integrând (19.2.2) obținem:
Teorema privind modificarea energiei cinetice în forma sa finală: modificarea energiei cinetice a unui sistem în timpul unei deplasări finale este egală cu suma muncii efectuate asupra acestei deplasări a tuturor forțelor externe și interne aplicate sistemului.
Subliniem că forțele interne nu sunt excluse. Pentru un sistem neschimbabil, suma muncii efectuate de toate forțele interne este zero și
Dacă constrângerile impuse sistemului nu se modifică în timp, atunci forțele, atât externe cât și interne, pot fi împărțite în constrângeri active și de reacție, iar ecuația (19.2.2) poate fi acum scrisă:
În dinamică este introdus conceptul de sistem mecanic „ideal”. Acesta este un sistem în care prezența conexiunilor nu afectează modificarea energiei cinetice, adică
Asemenea conexiuni, care nu se modifică în timp și a căror sumă de lucru pe o deplasare elementară este zero, se numesc ideale, iar ecuația (19.2.5) se va scrie:
Energia potențială a unui punct material într-o poziție dată M este mărimea scalară P, egală cu munca pe care o vor produce forțele câmpului la mutarea punctului din poziția M la zero.
P = A (lun) (19.3.1)
Energia potențială depinde de poziția punctului M, adică de coordonatele acestuia
P = P(x,y,z) (19.3.2)
Să explicăm aici că un câmp de forță este o parte a unui volum spațial, în fiecare punct al căruia o forță de o anumită mărime și direcție acționează asupra unei particule, în funcție de poziția particulei, adică de coordonatele x, y,z. De exemplu, câmpul gravitațional al Pământului.
Se numește o funcție U de coordonate a cărei diferență este egală cu lucru functie de putere. Un câmp de forță pentru care există o funcție de forță este numit câmp de forță potențial, iar forţele care acţionează în acest domeniu sunt forțe potențiale.
Fie punctele zero pentru două funcții de forță P(x,y,z) și U(x,y,z) coincid.
Folosind formula (14.3.5) obținem, i.e. dA = dU(x,y,z) și

unde U este valoarea funcţiei de forţă în punctul M. Prin urmare
П(x,y,z) = -U(x,y,z) (19.3.5)
Energia potențială în orice punct al câmpului de forță este egală cu valoarea funcției de forță în acest punct, luată cu semnul opus.
Adică, când luăm în considerare proprietățile câmpului de forță, în loc de funcția de forță, putem lua în considerare energia potențială și, în special, ecuația (19.3.3) va fi rescrisă ca
Munca efectuată de o forță potențială este egală cu diferența dintre valorile energiei potențiale ale unui punct în mișcare în pozițiile inițiale și finale.
În special, munca gravitației:
Fie ca toate forțele care acționează asupra sistemului să fie potențiale. Atunci pentru fiecare punct k al sistemului lucrul este egal cu
Apoi, pentru toate forțele, atât externe, cât și interne, vor exista
unde este energia potențială a întregului sistem.
Inlocuim aceste sume in expresia pentru energia cinetica (19.2.3):
sau in sfarsit:
Când se deplasează sub influența forțelor potențiale, suma energiei cinetice și potențiale a sistemului în fiecare dintre pozițiile sale rămâne constantă. Aceasta este legea conservării energiei mecanice.
O sarcină cu o greutate de 1 kg oscilează liber conform legii x = 0,1sinl0t. Coeficientul de rigiditate a arcului c = 100 N/m. Determinați energia mecanică totală a sarcinii la x = 0,05 m, dacă la x = 0 energia potențială este zero  . (0,5)
. (0,5)
O sarcină de masă m = 4 kg, căzând, face ca un cilindru cu raza R = 0,4 m să se rotească cu ajutorul unui filet Momentul de inerție al cilindrului față de axa de rotație este I = 0,2. Determinați energia cinetică a sistemului de corpuri în momentul în care viteza sarcinii v = 2m/s  . (10,5)
. (10,5)
Teorema energiei cinetice este formulată după cum urmează. Suma muncii tuturor forțelor (conservative și neconservative) aplicate unui corp este egală cu creșterea energiei sale cinetice. Folosind această teoremă putem generaliza legea conservării energiei mecaniceîn cazul în care sistem deschis (neizolat).: increment energie mecanică totală sistemul este egal lucru forțe exterioare asupra sistemului.
Traiectorie
O traiectorie este o linie imaginară descrisă de un corp în mișcare. În funcție de forma traiectoriei de mișcare, există curbilinii și rectilinii. Exemple de mișcare curbilinie: mișcarea unui corp aruncat în unghi față de orizont (traiectorie - parabolă), mișcarea unui punct material într-un cerc.
Frecare
Are loc între două corpuri în planul de contact al suprafețelor lor și este însoțită de disiparea (disiparea) energiei. Energie mecanică a unui sistem în care există frecare nu poate decât să scadă. Știința care studiază frecarea se numește tribologie. S-a stabilit experimental că forța maximă de frecare statică și forța de frecare de alunecare nu depind de aria de contact dintre corpuri și sunt proporționale cu forța normală de presiune care presează suprafețele una față de cealaltă. Se numește coeficientul de proporționalitate coeficientul de frecare(odihnă sau alunecare).
a treia lege a lui Newton
A treia lege a lui Newton este o lege fizică, conform căreia forțele de interacțiune dintre două puncte materiale sunt egale ca mărime, opuse ca direcție și acționează de-a lungul unei linii drepte care leagă aceste puncte. Ca și celelalte legi ale lui Newton, a treia lege este valabilă numai pentru sisteme de referință inerțiale. O scurtă afirmație a celei de-a treia legi: acțiunea este egală cu reacție.
A treia viteză de evacuare
A treia viteză cosmică este minimă viteză, necesar unei nave spațiale lansate de pe Pământ pentru a depăși gravitația Soarelui și a părăsi sistemul solar. Dacă Pământul în momentul lansării ar fi staționar și nu ar atrage corpul spre sine, atunci a treia viteză cosmică ar fi egală cu 42 km/s. Luând în considerare viteza mișcării orbitale a Pământului (30 km/s), a treia viteză de evacuare este 42-30 = 12 km/s (când este lansată în direcția mișcării orbitale) sau 42+30 = 72 km/s ( când sunt lansate în sens opus). Dacă luăm în considerare și forța gravitației către Pământ, atunci pentru a treia viteză de evacuare obținem valori de la 17 la 73 km/s.
Accelerare
Accelerația este o mărime vectorială care caracterizează viteza schimbării viteză. În mișcarea arbitrară, accelerația este definită ca raportul dintre creșterea vitezei și perioada corespunzătoare de timp. Dacă direcționăm această perioadă de timp la zero, obținem o accelerație instantanee. Aceasta înseamnă că accelerația este derivata vitezei în raport cu timpul. Dacă se consideră o perioadă finită de timp Δt, atunci accelerația se numește medie. În mișcarea curbilinie, accelerația totală este suma lui tangențială (tangentă)Şi accelerație normală.
Viteza unghiulara
Viteza unghiulară este o mărime vectorială care caracterizează mișcarea de rotație a unui corp rigid și este direcționată de-a lungul axei de rotație conform regulii șurubului din dreapta. Viteza unghiulară medie este numeric egală cu raportul dintre unghiul de rotație și perioada de timp corespunzătoare. Luând derivata unghiului de rotație în raport cu timpul, obținem viteza unghiulară instantanee. Unitatea SI a vitezei unghiulare este rad/s.
Accelerația gravitației
Accelerația unui corp în cădere liberă este accelerația cu care corpul se mișcă sub influența gravitației. Accelerația căderii libere este aceeași pentru toate corpurile, indiferent de acestea mase. Pe Pământ, accelerația unui corp în cădere liberă depinde de înălțimea deasupra nivelului mării și de latitudinea geografică și direcția către centrul Pământului. La latitudinea 45 0 și la nivelul mării, accelerația unui corp în cădere liberă este g = 9,80665 m/s 2 . În problemele educaționale, se presupune de obicei g = 9,81 m/s 2.
Legea fizică
O lege fizică este o legătură necesară, esențială și care se repetă constant între fenomene, procese și stări ale corpurilor. Cunoașterea legilor fizice este sarcina principală a științei fizice.
50. Pendul fizic
Pendul fizic - corp absolut rigid având o axă de rotaţie. Într-un câmp gravitațional, un pendul fizic poate oscila în jurul poziției de echilibru, în timp ce masa sistemele nu pot fi considerate concentrate la un moment dat. Perioada de oscilație a unui pendul fizic depinde de moment de inerție corp și de la distanța de la axa de rotație până la centru de masă.
Energie (din greaca energeia - activitate)
Energia este o mărime fizică scalară, care este o măsură generală a diferitelor forme de mișcare a materiei și o măsură a tranziției mișcării materiei de la o formă la alta. Principalele tipuri de energie: mecanică, internă, electromagnetică, chimică, gravitațională, nucleară. Unele tipuri de energie pot fi convertite în altele în cantități strict definite (vezi de asemenea Legea conservării și transformării energiei).
Termodinamică și fizică moleculară
Energie este o mărime fizică scalară care este o măsură unificată a diferitelor forme de mișcare a materiei și o măsură a tranziției mișcării materiei de la o formă la alta.
Pentru a caracteriza diverse forme de mișcare a materiei se introduc tipurile de energie corespunzătoare, de exemplu: mecanică, internă, energie electrostatică, interacțiuni intranucleare etc.
Energia se supune legii conservării, care este una dintre cele mai importante legi ale naturii.
Energia mecanică E caracterizează mișcarea și interacțiunea corpurilor și este o funcție a vitezelor și a pozițiilor relative ale corpurilor. Este egală cu suma energiilor cinetice și potențiale.
Energia cinetică
Să luăm în considerare cazul în care un corp de masă m există o forță constantă \(~\vec F\) (poate fi rezultanta mai multor forțe), iar vectorii forței \(~\vec F\) și deplasarea \(~\vec s\) sunt direcționați de-a lungul unei linie dreaptă într-o direcție. În acest caz, munca efectuată de forță poate fi definită ca O = F∙s. Modulul de forță conform celei de-a doua legi a lui Newton este egal cu F = m∙a, și modulul de deplasare sîn mişcare rectilinie uniform accelerată este asociat cu modulele iniţialei υ 1 si finala υ 2 viteze si acceleratii O expresia \(~s = \frac(\upsilon^2_2 - \upsilon^2_1)(2a)\) .
De aici ne apucăm de treabă
\(~A = F \cdot s = m \cdot a \cdot \frac(\upsilon^2_2 - \upsilon^2_1)(2a) = \frac(m \cdot \upsilon^2_2)(2) - \frac (m \cdot \upsilon^2_1)(2)\) . (1)
Se numește o mărime fizică egală cu jumătate din produsul masei unui corp și pătratul vitezei acestuia energia cinetică a corpului.
Energia cinetică este reprezentată de literă E k.
\(~E_k = \frac(m \cdot \upsilon^2)(2)\) . (2)
Atunci egalitatea (1) poate fi scrisă după cum urmează:
\(~A = E_(k2) - E_(k1)\) . (3)
Teorema energiei cinetice
munca forțelor rezultante aplicate corpului este egală cu modificarea energiei cinetice a corpului.
Deoarece modificarea energiei cinetice este egală cu munca forței (3), energia cinetică a unui corp este exprimată în aceleași unități ca și munca, adică în jouli.
Dacă viteza iniţială de mişcare a unui corp de masă m este zero și corpul își crește viteza până la valoarea υ , atunci munca efectuată de forță este egală cu valoarea finală a energiei cinetice a corpului:
\(~A = E_(k2) - E_(k1)= \frac(m \cdot \upsilon^2)(2) - 0 = \frac(m \cdot \upsilon^2)(2)\) . (4)
Sensul fizic al energiei cinetice
Energia cinetică a unui corp care se mișcă cu viteza v arată cât de multă muncă trebuie făcută de o forță care acționează asupra unui corp în repaus pentru a-i conferi această viteză.
Energia potențială
Energia potențială este energia interacțiunii dintre corpuri.
Energia potențială a unui corp ridicat deasupra Pământului este energia de interacțiune dintre corp și Pământ prin forțele gravitaționale. Energia potențială a unui corp deformat elastic este energia de interacțiune a părților individuale ale corpului între ele prin forțe elastice.
Potenţial sunt numite rezistenţă, al cărui lucru depinde numai de poziția inițială și finală a unui punct sau corp material în mișcare și nu depinde de forma traiectoriei.
Într-o traiectorie închisă, munca efectuată de forța potențială este întotdeauna zero. Forțele potențiale includ forțele gravitaționale, forțele elastice, forțele electrostatice și unele altele.
Puterile, al căror lucru depinde de forma traiectoriei, se numesc nepotenţial. Când un punct sau un corp material se mișcă de-a lungul unei traiectorii închise, munca efectuată de forța nepotențială nu este egală cu zero.
Energia potențială de interacțiune a unui corp cu Pământul
Să găsim munca făcută de gravitație F t la deplasarea unui corp de masă m vertical în jos de la înălțime h 1 deasupra suprafeței Pământului până la o înălțime h 2 (Fig. 1). Dacă diferența h 1 – h 2 este neglijabilă în comparație cu distanța până la centrul Pământului, apoi cu forța gravitațională F t în timpul mișcării corpului poate fi considerat constant și egal mg.
Deoarece deplasarea coincide în direcție cu vectorul gravitațional, munca efectuată de gravitație este egală cu
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
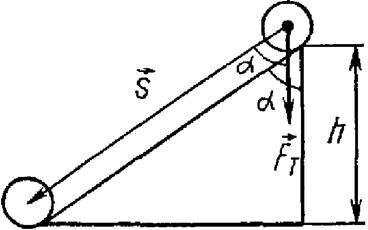
Să luăm acum în considerare mișcarea unui corp de-a lungul unui plan înclinat. La deplasarea unui corp pe un plan înclinat (Fig. 2), forța gravitației F t = m∙g functioneaza
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
Unde h– înălțimea planului înclinat, s– modul de deplasare egal cu lungimea planului înclinat.
Mișcarea unui corp dintr-un punct ÎN la obiect CU de-a lungul oricărei traiectorii (Fig. 3) poate fi imaginat mental ca fiind constând din mișcări de-a lungul secțiunilor de planuri înclinate cu diferite înălțimi h’, h'' etc. Munca O gravitația tot drumul de la ÎN V CU egală cu suma lucrărilor pe secțiuni individuale ale traseului:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\), (7)
Unde h 1 și h 2 – înălțimile față de suprafața Pământului la care sunt situate, respectiv, punctele ÎNŞi CU.

Egalitatea (7) arată că munca gravitației nu depinde de traiectoria corpului și este întotdeauna egală cu produsul dintre modulul gravitațional și diferența de înălțimi în pozițiile inițiale și finale.
Când vă deplasați în jos, munca gravitației este pozitivă, când vă deplasați în sus este negativă. Lucrul efectuat de gravitație pe o traiectorie închisă este zero.
Egalitatea (7) poate fi reprezentată după cum urmează:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
O mărime fizică egală cu produsul dintre masa unui corp înmulțită cu modulul de accelerație al căderii libere și înălțimea la care corpul este ridicat deasupra suprafeței Pământului se numește energie potenţială interacțiunea dintre corp și Pământ.
Lucru efectuat de gravitație la mișcarea unui corp de masă m dintr-un punct situat la înălţime h 2, până la un punct situat la înălțime h 1 de la suprafața Pământului, de-a lungul oricărei traiectorii, este egală cu modificarea energiei potențiale de interacțiune dintre corp și Pământ, luată cu semnul opus.
\(~A = - (E_(p2) - E_(p1))\) . (9)
Energia potențială este indicată de literă E p.
Valoarea energiei potențiale a unui corp ridicat deasupra Pământului depinde de alegerea nivelului zero, adică de înălțimea la care se presupune că energia potențială este zero. De obicei, se presupune că energia potențială a unui corp de pe suprafața Pământului este zero.
Cu această alegere a nivelului zero, energia potențială E p unui corp situat la o înălțime h deasupra suprafeței Pământului, egal cu produsul dintre masa m a corpului și modulul de accelerație gravitațională g si distanta h de la suprafața Pământului:
\(~E_p = m \cdot g \cdot h\) . (10)
Semnificația fizică a energiei potențiale de interacțiune a unui corp cu Pământul
energia potențială a unui corp asupra căruia acționează gravitația este egală cu munca efectuată de gravitație la deplasarea corpului la nivelul zero.
Spre deosebire de energia cinetică a mișcării de translație, care poate avea doar valori pozitive, energia potențială a unui corp poate fi atât pozitivă, cât și negativă. Masa corporală m, situat la o înălțime h, Unde h < h 0 (h 0 – înălțime zero), are energie potențială negativă:
\(~E_p = -m \cdot g \cdot h\) .
Energia potențială a interacțiunii gravitaționale
Energia potențială a interacțiunii gravitaționale a unui sistem de două puncte materiale cu mase mŞi M, situat la distanta r unul din celălalt este egal
\(~E_p = G \cdot \frac(M \cdot m)(r)\) . (11)
Unde G este constanta gravitațională și zero al referinței de energie potențială ( E p = 0) acceptat la r = ∞.
Energia potențială a interacțiunii gravitaționale a unui corp cu masa m cu Pământul, unde h- înălțimea corpului deasupra suprafeței Pământului, M e – masa Pământului, R e este raza Pământului, iar zero al citirii energiei potențiale este ales la h = 0.
\(~E_e = G \cdot \frac(M_e \cdot m \cdot h)(R_e \cdot (R_e +h))\) . (12)
În aceeași condiție de alegere a referinței zero, energia potențială a interacțiunii gravitaționale a unui corp cu masa m cu Pământul pentru altitudini joase h (h « R e) egal
\(~E_p = m \cdot g \cdot h\),
unde \(~g = G \cdot \frac(M_e)(R^2_e)\) este modulul de accelerație gravitațională lângă suprafața Pământului.
Energia potențială a unui corp deformat elastic
Să calculăm munca efectuată de forța elastică atunci când deformația (alungirea) arcului se modifică de la o anumită valoare inițială x 1 până la valoarea finală x 2 (Fig. 4, b, c).

Forța elastică se modifică pe măsură ce arcul se deformează. Pentru a afla munca efectuată de forța elastică, puteți lua valoarea medie a modulului forței (deoarece forța elastică depinde liniar de x) și înmulțiți cu modulul deplasării:
\(~A = F_(upr-cp) \cdot (x_1 - x_2)\) , (13)
unde \(~F_(upr-cp) = k \cdot \frac(x_1 - x_2)(2)\) . De aici
\(~A = k \cdot \frac(x_1 - x_2)(2) \cdot (x_1 - x_2) = k \cdot \frac(x^2_1 - x^2_2)(2)\) sau \(~A = -\left(\frac(k \cdot x^2_2)(2) - \frac(k \cdot x^2_1)(2) \right)\) . (14)
Se numește o mărime fizică egală cu jumătate din produsul rigidității unui corp prin pătratul deformării acestuia energie potenţială corp deformat elastic:
\(~E_p = \frac(k \cdot x^2)(2)\) . (15)
Din formulele (14) și (15) rezultă că munca forței elastice este egală cu modificarea energiei potențiale a unui corp deformat elastic, luată cu semnul opus:
\(~A = -(E_(p2) - E_(p1))\) . (16)
Dacă x 2 = 0 și x 1 = X, atunci, după cum se poate vedea din formulele (14) și (15),
\(~E_p = A\) .
Semnificația fizică a energiei potențiale a unui corp deformat
energia potențială a unui corp deformat elastic este egală cu munca efectuată de forța elastică atunci când corpul trece într-o stare în care deformația este zero.
Energia potențială caracterizează corpurile care interacționează, iar energia cinetică caracterizează corpurile în mișcare. Atât energia potențială, cât și cea cinetică se schimbă numai ca urmare a unei astfel de interacțiuni a corpurilor în care forțele care acționează asupra corpurilor lucrează altfel decât zero. Să luăm în considerare problema schimbărilor de energie în timpul interacțiunilor corpurilor care formează un sistem închis.
Sistem inchis- acesta este un sistem asupra căruia nu se acționează forțele externe sau acțiunea acestor forțe este compensată. Dacă mai multe corpuri interacționează între ele numai prin forțe gravitaționale și elastice și nicio forță exterioară nu acționează asupra lor, atunci pentru orice interacțiune a corpurilor, munca forțelor elastice sau gravitaționale este egală cu modificarea energiei potențiale a corpurilor, luată cu semnul opus:
\(~A = -(E_(p2) - E_(p1))\) . (17)
Conform teoremei energiei cinetice, munca efectuată de aceleași forțe este egală cu modificarea energiei cinetice:
\(~A = E_(k2) - E_(k1)\) . (18)
Dintr-o comparație a egalităților (17) și (18) este clar că modificarea energiei cinetice a corpurilor într-un sistem închis este egală în valoare absolută cu modificarea energiei potențiale a sistemului de corpuri și opus în semn:
\(~E_(k2) - E_(k1) = -(E_(p2) - E_(p1))\) sau \(~E_(k1) + E_(p1) = E_(k2) + E_(p2) \) . (19)
Legea conservării energiei în procesele mecanice:
suma energiei cinetice și potențiale a corpurilor care alcătuiesc un sistem închis și interacționează între ele prin forțe gravitaționale și elastice rămâne constantă.
Se numește suma energiei cinetice și potențiale a corpurilor energie mecanică totală.
Să facem un experiment simplu. Să aruncăm o minge de oțel în sus. Dând viteza inițială υ inch, îi vom da energie cinetică, motiv pentru care va începe să crească în sus. Acțiunea gravitației duce la o scădere a vitezei mingii și, prin urmare, a energiei sale cinetice. Dar mingea se ridică din ce în ce mai sus și capătă din ce în ce mai multă energie potențială ( E p = m∙g∙h). Astfel, energia cinetică nu dispare fără urmă, ci este transformată în energie potențială.
În momentul atingerii punctului de vârf al traiectoriei ( υ = 0) mingea este complet lipsită de energie cinetică ( E k = 0), dar în același timp energia sa potențială devine maximă. Apoi mingea își schimbă direcția și se mișcă în jos cu viteza crescândă. Acum energia potențială este convertită înapoi în energie cinetică.
Legea conservării energiei relevă sens fizic concepte lucru:
munca forțelor gravitaționale și elastice, pe de o parte, este egală cu o creștere a energiei cinetice și, pe de altă parte, cu o scădere a energiei potențiale a corpurilor. Prin urmare, munca este egală cu energia convertită de la un tip la altul.
Legea schimbării energiei mecanice
Dacă un sistem de corpuri care interacționează nu este închis, atunci energia sa mecanică nu este conservată. Modificarea energiei mecanice a unui astfel de sistem este egală cu munca forțelor externe:
\(~A_(vn) = \Delta E = E - E_0\) . (20)
Unde EŞi E 0 – energiile mecanice totale ale sistemului în starea finală, respectiv inițială.
Un exemplu de astfel de sistem este un sistem în care, împreună cu forțele potențiale, acționează forțe nepotențiale. Forțele nepotențiale includ forțele de frecare. În cele mai multe cazuri, atunci când unghiul dintre forța de frecare F r corpul este π radiani, munca efectuată de forța de frecare este negativă și egală cu
\(~A_(tr) = -F_(tr) \cdot s_(12)\) ,
Unde s 12 – calea corpului între punctele 1 și 2.
Forțele de frecare în timpul mișcării unui sistem reduc energia cinetică a acestuia. Ca urmare a acestui fapt, energia mecanică a unui sistem închis neconservativ scade întotdeauna, transformându-se în energia formelor de mișcare nemecanice.
De exemplu, o mașină care se deplasează de-a lungul unei secțiuni orizontale a drumului, după ce a oprit motorul, parcurge o anumită distanță și se oprește sub influența forțelor de frecare. Energia cinetică a mișcării înainte a mașinii a devenit zero, dar energia potențială nu a crescut. Când mașina frâna, plăcuțele de frână, anvelopele și asfaltul s-au încălzit. În consecință, ca urmare a acțiunii forțelor de frecare, energia cinetică a mașinii nu a dispărut, ci s-a transformat în energia internă a mișcării termice a moleculelor.
Legea conservării și transformării energiei
În orice interacțiune fizică, energia este transformată dintr-o formă în alta.
Uneori unghiul dintre forța de frecare F tr și deplasarea elementară Δ r este egal cu zero și munca forței de frecare este pozitivă:
\(~A_(tr) = F_(tr) \cdot s_(12)\) ,
Exemplul 1. Lasă forța externă F actioneaza asupra blocului ÎN, care poate aluneca pe cărucior D(Fig. 5). Dacă căruciorul se mișcă spre dreapta, atunci munca efectuată de forța de frecare de alunecare F tr2 care acționează asupra căruciorului din lateralul blocului este pozitiv:

Exemplul 2. Când o roată se rostogolește, forța sa de frecare de rulare este direcționată de-a lungul mișcării, deoarece punctul de contact al roții cu suprafața orizontală se mișcă în direcția opusă direcției de mișcare a roții, iar munca forței de frecare este pozitivă. (Fig. 6):

Literatură
- Kabardin O.F. Fizica: Referință. materiale: manual. manual pentru elevi. – M.: Educație, 1991. – 367 p.
- Kikoin I.K., Kikoin A.K. Fizica: manual. pentru clasa a IX-a. medie şcoală – M.: Prosveshchenie, 1992. – 191 p.
- Manual de fizică elementară: Proc. indemnizatie. În 3 volume / Ed. G.S. Landsberg: vol. 1. Mecanica. Căldură. Fizica moleculară. – M.: Fizmatlit, 2004. – 608 p.
- Yavorsky B.M., Seleznev Yu.A. Un ghid de referință pentru fizică pentru cei care intră în universități și autoeducație. – M.: Nauka, 1983. – 383 p.
munca forțelor rezultante aplicate corpului este egală cu modificarea energiei cinetice a corpului.
Deoarece modificarea energiei cinetice este egală cu munca forței (3), energia cinetică a unui corp este exprimată în aceleași unități ca și munca, adică în jouli.
Dacă viteza iniţială de mişcare a unui corp de masă m este zero și corpul își crește viteza până la valoarea υ , atunci munca efectuată de forță este egală cu valoarea finală a energiei cinetice a corpului:
O=Ek 2−Ek 1=m⋅υ 22−0=m⋅υ 22 .
42) Câmpuri potențiale
Câmp potențial
câmp conservator, un câmp vectorial a cărui circulație de-a lungul oricărei traiectorii închise este egală cu zero. Dacă un câmp de forță este un câmp de forță, atunci aceasta înseamnă că munca forțelor câmpului de-a lungul unei traiectorii închise este egală cu zero. Pentru P. p. O(M) există o funcție atât de unică u(M)(Potențial de câmp) că O= grad u(vezi Gradient). Dacă un câmp de câmp este dat într-un domeniu simplu conectat Ω, atunci potențialul acestui câmp poate fi găsit folosind formula
în care A.M- orice curbă netedă care leagă un punct fix O de la Ω cu un punct M, t - vector unitar al curbei tangente A.M.și / - lungimea arcului A.M. bazat pe puncte O. Dacă O(M) - P. p., apoi putrezesc o= 0 (vezi vortexul câmpului vectorial). În schimb, dacă putrezesc O= 0 și câmpul este definit într-un domeniu simplu conectat și este diferențiabil, atunci O(M) - Potențialul P.p. sunt, de exemplu, un câmp electrostatic, un câmp gravitațional și un câmp de viteză în timpul mișcării irrotaționale.
43) Energia potențială
Energia potențială- o mărime fizică scalară care caracterizează capacitatea unui anumit corp (sau punct material) de a lucra datorită poziționării sale în câmpul de acțiune al forțelor. O altă definiție: energia potențială este o funcție de coordonate, care este un termen în sistemul lagrangian și descrie interacțiunea elementelor sistemului. Termenul „energie potențială” a fost inventat în secolul al XIX-lea de către inginerul și fizicianul scoțian William Rankine.
Unitatea de energie din SI este Joule.
Se presupune că energia potențială este zero pentru o anumită configurație de corpuri în spațiu, a cărei alegere este determinată de comoditatea calculelor ulterioare. Procesul de alegere a acestei configurații este numit normalizarea energiei potenţiale.
O definiție corectă a energiei potențiale poate fi dată doar într-un câmp de forțe, a cărui activitate depinde doar de poziția inițială și finală a corpului, dar nu și de traiectoria mișcării acestuia. Astfel de forțe sunt numite conservatoare.
De asemenea, energia potențială este o caracteristică a interacțiunii mai multor corpuri sau a unui corp și a unui câmp.
Orice sistem fizic tinde spre o stare cu cea mai mică energie potențială.
Energia potențială a deformării elastice caracterizează interacțiunea dintre părți ale corpului.
Energia potențială din câmpul gravitațional al Pământului lângă suprafață este exprimată aproximativ prin formula:
Unde E p- energia potențială a corpului, m- greutatea corporală, g- accelerare în cădere liberă, h- înălțimea centrului de masă al corpului deasupra unui nivel zero ales arbitrar.
44) Relația dintre forță și energia potențială
Fiecare punct al câmpului potențial corespunde, pe de o parte, unei anumite valori a vectorului forță care acționează asupra corpului, iar, pe de altă parte, unei anumite valori a energiei potențiale. Prin urmare, trebuie să existe o anumită relație între forță și energia potențială.
Pentru a stabili această legătură, să calculăm munca elementară efectuată de forțele câmpului în timpul unei mici deplasări a corpului care are loc de-a lungul unei direcții alese în mod arbitrar în spațiu, pe care o notăm cu litera . Această lucrare este egală cu
unde este proiecția forței pe direcție.
Deoarece în acest caz lucrarea se face datorită rezervei de energie potențială, aceasta este egală cu pierderea de energie potențială pe segmentul de axă:
Din ultimele două expresii obținem
Ultima expresie dă valoarea medie a intervalului. La
pentru a obține valoarea în punctul în care trebuie să mergeți la limită:
în vector de matematică,
unde a este o funcție scalară a lui x, y, z, numită gradientul acestui scalar și notat cu simbolul . Prin urmare, forța este egală cu gradientul de energie potențială luat cu semnul opus
45) Legea conservării energiei mecanice
Lucrul elementar dA efectuat de o forță asupra unei deplasări elementare este o mărime egală cu produsul scalar al
unde unghiul a este unghiul dintre vectorii forță și deplasare (Fig. 1.22, a);
Modul vectorial de deplasare elementară sau cale elementară trecut de punctul de aplicare a forței.

Munca efectuată de o forță asupra unei deplasări finale este egală cu suma lucrărilor elementare:
 . (1.61)
. (1.61)
Dacă forța este constantă ( =const), atunci lucrul ei pe o secțiune dreaptă de lungime l se va scrie după cum urmează:
![]() . (1.62)
. (1.62)
Lucrul efectuat de o forță poate fi pozitiv, negativ sau nul. Astfel, lucrul forțelor constante aplicate corpului (Fig. 1.22b) pe secțiunea orizontală a traseului l este egal cu:
Pentru a introduce conceptul de energie cinetică W k a unui corp, notăm lucrarea elementară dA forțe sub altă formă (vezi 1.2.2):
Atunci pentru munca forței care transferă corpul din starea 1 (viteza corpului) în starea 2 (viteza corpului) putem scrie:
Din formula rezultată rezultă că munca forței este egală cu diferența dintre două mărimi care determină starea inițială (viteză) și finală (viteză) a corpului. În acest caz, condițiile de trecere de la starea 1 la starea 2 nu afectează expresia scrisă. Prin urmare, putem introduce funcția de stare a corpului, energia lui cinetică W as SPV, care caracterizează capacitatea unui corp de a lucra prin schimbarea vitezei de mișcare a acestuia și egală cu
În această expresie, se alege o valoare constantă, presupunând că la viteza zero a unui corp energia sa cinetică este zero, prin urmare
Energia cinetică a corpurilor nu depinde de modul în care a fost atinsă o anumită viteză u este o funcție de starea corpului, mărime pozitivă care depinde de alegerea sistemului de referință.
Introducerea lui W k ne permite să formulăm o teoremă despre energia cinetică, conform căreia suma algebrică a muncii tuturor forțelor care acționează asupra unui corp este egală cu creșterea energiei cinetice a corpului:
Această teoremă este utilizată pe scară largă pentru a analiza interacțiunea corpurilor nu numai în mecanică, ci și în alte secțiuni ale cursurilor de fizică, cum ar fi electrostatică, curent continuu, electromagnetism, oscilații și unde etc.
1.4.2. Energia cinetică a unui a.t.t.
Să luăm un a.t.t care se rotește în jurul unei axe fixe cu viteză unghiulară (Fig. 1.16, b). Să ne imaginăm corpul ca pe o colecție de m.t. mase dm, atunci pentru energia cinetică a corpului putem scrie:
Deci, energia cinetică a.t.t. rotirea față de o axă fixă de rotație, este determinată de formula
Dacă un corp participă simultan la mișcări de translație (plat) și de rotație (de exemplu, mișcarea unui cilindru fără alunecare de-a lungul unui plan, Fig. 1.23, a), atunci energia sa cinetică poate fi obținută
 Fig.1.23
Fig.1.23
ca suma energiei cinetice a mișcării de translație a unui corp împreună cu axa de rotație care trece prin centrul său de masă (punctul DESPRE), cu viteza și mișcarea de rotație a corpului față de această axă cu viteza unghiulară
 .
(1.67)
.
(1.67)
Pentru solid ( eu 1=1/2mR 2) și cu pereți subțiri ( eu 2=mR 2) cilindri de aceeași masă m si raza R energiile cinetice se vor scrie astfel:
 .
.
Formulele obținute pentru energia cinetică a cilindrilor fac posibilă explicarea experimentului prin diferența de timp de rulare a acestora în jos dintr-un plan înclinat cu înălțime. h si lungime l(Fig. 1.23, b). Astfel, conform legii conservării energiei (forța de frecare în timpul mișcării cilindrilor poate fi practic neglijată), obținem
 ,
,
unde se notează vitezele cilindrilor plini și gol la baza planului înclinat.
Când cilindrii rulează, centrul lor de masă se mișcă uniform accelerat fără o viteză inițială și, prin urmare, conform formulei (1.13), putem scrie:
 ,
,
aceste. Este nevoie de mai mult pentru a rula un cilindru gol decât un cilindru solid.
Calitativ, acest lucru poate fi explicat prin faptul că un cilindru gol este mai inert decât unul solid (pentru acesta momentul de inerție față de axa de rotație este mai mare) și, prin urmare, își schimbă viteza mai lent și, prin urmare, petrece mai mult timp. rostogolindu-se în jos pe planul înclinat.
După cum se poate observa din Fig. 1.23, a, modulele de viteză ale punctelor de pe suprafața cilindrului vor fi diferite (u B =0, , u A =2u) datorită faptului că aceste puncte participă simultan atât la mișcări de translație cât și de rotație la viteze Şi , și pentru fiecare punct este îndreptat tangențial la suprafața cilindrului și este egal ca mărime u( ).
Rețineți că mișcarea cilindrului poate fi considerată și ca o serie de rotații succesive în jurul axei instantanee care trece prin punctul CU(Fig. 1.23, a) cu viteza unghiulară w. Mai mult, în acest caz, energia cinetică a corpului este determinată și de formula (1.67).


